En esta actividad vamos a empezar a trabajar con servos. Vamos a intentar que un servo se mueva desde los 0º a los 90º y viceversa cada segundo.
¿Qué son?
Los servos son motores que permiten mover objetos con precisión en ángulos específicos. Se utilizan en robots, brazos mecánicos y sistemas automatizados.
Tipos:
- Posición.- Los movimientos que pueden hacer estos servos son: de 0° a 180°, de 0° a 270°, de 0° a 360°. Ejemplos de uso: Brazos robóticos, mecanismos de precisión
- Rotación contínua.- Los movimientos que pueden hacer estos servos son giros sin fin en ambas direcciones. Ejemplos de uso: Ruedas de robots, ventiladores automáticos
¿Cómo funcionan los servos?
- Servos de posición: Se controlan indicando el ángulo exacto (Ej. 0°, 90°, 180°).
- Servos de rotación continua: Se controlan indicando velocidad y dirección
- 90º.- El servo de rotación continua no se mueve.
- 0º.- Máxima velocidad en un sentido.
- 180º.- Máxima velocidad en el sentido contrario.
- Cuanto más me alejo de 90º, hacia arriba o hacia abajo, más rápido gira el servo de rotación continua hasta llegar a su máximo (0º o º80º)
Conexión:
Los servos, aunque pueda parecer otra cosa, son una salida digital. Por lo tanto, cuando usemos servos, los debemos conectar a un pin digital.
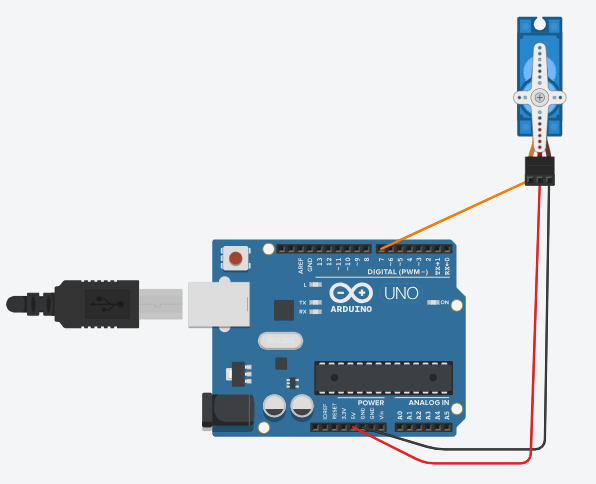
- En la web de Tinkercad, vamos a añadir los componentes que vamos a utilizar, en este caso:
- Una placa de Arduino UNO.
- Un servo.
- Nos fijamos en que el servo tiene 3 cables. Como dijimos anteriormente, si el componente tiene 3 cables:
- uno es de potencia, el cable rojo,
- otro es el de tierra, que es de color negro o marrón,
- y otro de señal, que suele ser amarillo, aunque puede ser de otro color.
Programación:
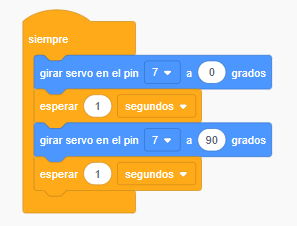
- Al igual que en las actividades anteriores, pulsa el botón “Código”. Limpiamos el interior del bucle “Siempre” para empezar desde cero.
- Para esta práctica, los códigos que vamos a necesitar van a ser:
- el de "Girar servo en el pin X al número de grados que queramos"
- y el de "Esperar X segundos"
Simulación:
Montamos nuestro código y pulsamos en "Iniciar simulación". Si todo ha ido bien, veremos cómo el servo se mueve en nuestra simulación.
Ejemplo aplicado a la vida real
- Servos de posición: Brazos robóticos, cerraduras electrónicas.
- Servos de rotación continua: Ruedas de robots, cintas transportadoras.
Reto:
- Haz que el servo de posición se mueva con un patrón personalizado.
- Intenta que el servo vaya de 0º a 90º, y viceversa, cada segundo, durante 5 repeticiones
- Modifica el código para conseguir lo anterior y, después de las 5 repeticiones entre 0º y 90º, se quede oscilando entre 90 y 180º cada segundos de manera indefinida